Da raspibo.
(diff) ← Versione meno recente | Versione attuale (diff) | Versione più recente → (diff)
|
|
Il materiale per ralizzare il sensore (la foto è incompleta):
- 1 foglietto in grafene (le dimensioni vanno calibrate in base alle esigenze
- 1 pezzo di basetta ramata doppia faccia
- 1 connettore strip per collegare le facce di rame ai fili
- biadesivo
- guaina termorestringente
- tester
- guanti
- carta assorbente bagnata
|
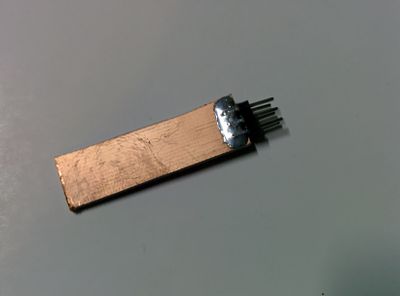 Saldare il connettore alle facce ramate |
Saldare il connettore strip ad entrambe le facce ramate
|
 Verficare la conduzione del grafene |
Provare con il tester che ci sia continuità elettrica tra gli estremi del film.
|
 Utilizzare un pò di carta assorbente umida |
Utlizzare un pò di carta assorbente bagnata per rimuovere il grafene nella zona centrale del film.
|
|
 Verificare di aver rimosso tutto il grafene |
Provare con il tester che ora le due zone siano isolate elettrica per verificare che tutto il grafene sia stato rimosso.
|
|
|
Terminare l'assemblaggio facendo aderire le due facce ramate della basetta usando un pezzetto di biadesivo e la guaina termorestringente.
|
Questo sensore ha una resistenza variabile in base alla quantità di grafene depositata sul film, può comunque essere utilizzato sia su arduino che che su raspberry utilizzando un partitore resistivo eventualmente costituito dalla resistenza interna di pullup.
Per uso in ambienti polverosi può essere utile racchiuderlo in qualcosa di protettivo.
Il sensore è molto sottile come spessore e poò essere abbinato ad un materiale spugnoso incollato all'esterno per aumentarne lo spessore.
Uno di questi sensori è in fase di test nel progetto Roomba_scheduler.






