Differenze tra le versioni di "Disagio Alato"
Jump to navigation
Jump to search
m (→Materiali) |
|||
| Riga 2: | Riga 2: | ||
= Il disagio piomba dal cielo quando meno te lo aspetti! = | = Il disagio piomba dal cielo quando meno te lo aspetti! = | ||
| + | |||
| + | [[File:Disagio_alato_in_costruzione.jpg|200px|thumb|right|gran parte del lavoro di assemblaggio è stato fatto]] | ||
Davide sta costruendo il suo primo quadcopter. Consapevole che creerà molto disagio. | Davide sta costruendo il suo primo quadcopter. Consapevole che creerà molto disagio. | ||
| Riga 8: | Riga 10: | ||
== Materiali == | == Materiali == | ||
| + | |||
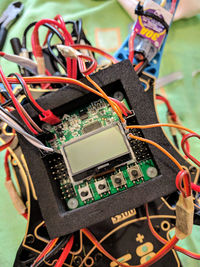
| + | [[File:Fc_kk2.jpg|200px|thumb|right|la flight control board KK2. In alto: buzzer per avvisi sonori (connettore rosso), monitoraggio della batteria (connettore nero, cavi rosso e marrone). A sinistra: i tre cavi che vanno alla ricevente (positivo, negativo, segnale PPM). A sinistra: i quattro segnali verso gli ESC; il primo comprende anche l'alimentazione della scheda stessa, proveniente dal BEC di uno degli ESC]] | ||
* frame da 480mm con distribution board integrata | * frame da 480mm con distribution board integrata | ||
| Riga 22: | Riga 26: | ||
== Note costruttive == | == Note costruttive == | ||
| + | |||
| + | [[File:Fissaggio_fc.jpg|200px|thumb|right|dettagli del fissaggio della flight control board, in scatola isolante con bulloncini di plastica per evitare vibrazioni e nastro biadesivo e filo per legare la scatola al frame]] | ||
Nonostante la distribution board integrata, ho fatto attenzione a comprare ESC e motori dotati dello stesso connettore (bullet 3.5mm), cosa che mi ha consentito di evitare di saldare in maniera permanente i connettori: ho semplicemente comprato un cavo breakout da XT60 (connettore alla batteria) verso 6 coppie bullet 3.5mm, quattro per gli ESC ed un paio extra. | Nonostante la distribution board integrata, ho fatto attenzione a comprare ESC e motori dotati dello stesso connettore (bullet 3.5mm), cosa che mi ha consentito di evitare di saldare in maniera permanente i connettori: ho semplicemente comprato un cavo breakout da XT60 (connettore alla batteria) verso 6 coppie bullet 3.5mm, quattro per gli ESC ed un paio extra. | ||
Versione attuale delle 22:45, 8 dic 2016
Il disagio piomba dal cielo quando meno te lo aspetti!

Davide sta costruendo il suo primo quadcopter. Consapevole che creerà molto disagio.
L'obiettivo è un multirotor tranquillo, con cui imparare le basi ed eventualmente da usare per fotografia aerea.
Materiali

la flight control board KK2. In alto: buzzer per avvisi sonori (connettore rosso), monitoraggio della batteria (connettore nero, cavi rosso e marrone). A sinistra: i tre cavi che vanno alla ricevente (positivo, negativo, segnale PPM). A sinistra: i quattro segnali verso gli ESC; il primo comprende anche l'alimentazione della scheda stessa, proveniente dal BEC di uno degli ESC
- frame da 480mm con distribution board integrata
- flight control board KK2.1.5
- quattro motori Turnigy Multistar 2213, 980Kv; supportano 2o 3 celle, corrente massima 15A
- Afro ESC 30A
- eliche 10x4.5 (CW/CCW)
- radiocomando Turnigy TGY-I6S
- batterie varie; ho iniziato con delle 2200mAh 3S 40C, ma sarebbe meglio qualcosa con più Ampere.
- caricabatterie SkyRC B6AC V2
- cavi, connettori, eliche di riserva, bulloni e viti di plastica, colla frenafiletti
Per un totale di circa 300 euro; facendo scelte più oculate si può facilmente scendere di qualche decina di euro, mantenendo queste dimensioni.
Note costruttive

Nonostante la distribution board integrata, ho fatto attenzione a comprare ESC e motori dotati dello stesso connettore (bullet 3.5mm), cosa che mi ha consentito di evitare di saldare in maniera permanente i connettori: ho semplicemente comprato un cavo breakout da XT60 (connettore alla batteria) verso 6 coppie bullet 3.5mm, quattro per gli ESC ed un paio extra.